



标题:AGV实时轨迹前端实现:技术解析与实战应用
引言
随着自动化技术的飞速发展,自动导引车(AGV)在物流、制造等行业中的应用越来越广泛。AGV的实时轨迹跟踪对于提高生产效率和物流管理至关重要。本文将深入探讨AGV实时轨迹前端实现的技术原理、关键步骤以及在实际应用中的注意事项。
一、AGV实时轨迹前端概述
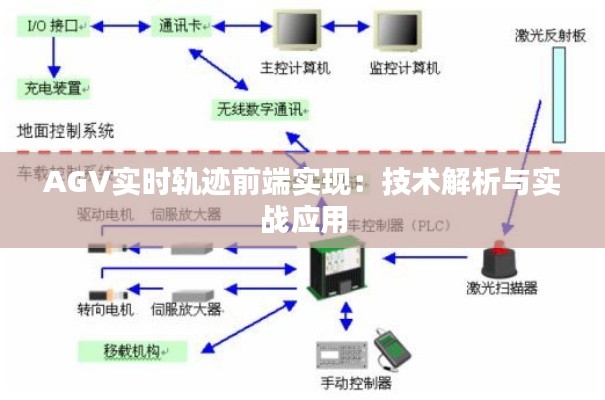
AGV实时轨迹前端是指负责实时显示AGV运行轨迹的软件部分。它通过接收AGV发送的位置信息,将轨迹以可视化的形式展示在用户界面中。实时性、准确性和稳定性是AGV实时轨迹前端的核心要求。
二、技术原理
AGV实时轨迹前端主要基于以下技术实现:
- WebSocket协议:WebSocket协议是一种在单个TCP连接上进行全双工通信的协议,可以实现服务器与客户端之间的实时数据传输。
- 前端框架:使用前端框架如React或Vue.js可以简化开发过程,提高代码的可维护性和可扩展性。
- 地图可视化库:利用地图可视化库如Leaflet或Mapbox.js可以方便地展示AGV的实时轨迹。
三、关键步骤
- 数据采集:通过AGV上的传感器或GPS模块获取位置信息,并实时传输到服务器。
- 数据处理:服务器端对采集到的数据进行处理,包括去噪、滤波等,确保数据的准确性。
- 数据传输:服务器通过WebSocket协议将处理后的数据实时传输到前端。
- 前端展示:前端接收到数据后,利用地图可视化库将AGV的实时轨迹绘制在地图上。
四、实战应用
以下是一个简单的AGV实时轨迹前端实现案例:
1. 环境搭建
- 使用Node.js作为服务器端语言,Express框架搭建服务器。
- 使用React作为前端框架,创建React项目。
2. 服务器端实现
const express = require('express');
const WebSocket = require('ws');
const app = express();
const wss = new WebSocket.Server({ server: app.listen(8080) });
wss.on('connection', function connection(ws) {
ws.on('message', function incoming(message) {
console.log('received: %s', message);
});
const agvId = 'AGV001';
const agvPosition = {
latitude: 39.9042,
longitude: 116.4074
};
setInterval(() => {
ws.send(JSON.stringify({ agvId, agvPosition }));
}, 1000);
});3. 前端实现
import React, { useState, useEffect } from 'react';
import { Map, TileLayer, Marker } from 'react-leaflet';
const AgvTracking = () => {
const [agvPosition, setAgvPosition] = useState(null);
useEffect(() => {
const ws = new WebSocket('ws://localhost:8080');
ws.onmessage = (event) => {
const data = JSON.parse(event.data);
setAgvPosition(data.agvPosition);
};
return () => ws.close();
}, []);
return (
<Map center={[39.9042, 116.4074]} zoom={13}>
<TileLayer
url="https://{s}.tile.openstreetmap.org/{z}/{x}/{y}.png"
attribution='© <a href="https://www.openstreetmap.org/copyright">OpenStreetMap</a> contributors'
/>
{agvPosition && (
<Marker position={[agvPosition.latitude, agvPosition.longitude]} />
)}
</Map>
);
};
export default AgvTracking;五、注意事项
- 数据安全性:确保AGV位置信息的传输过程安全可靠,防止数据泄露。
- 性能优化:针对大量AGV同时运行的情况,优化前端渲染性能,提高用户体验。
- 实时性保证:合理配置WebSocket服务器和客户端,确保数据传输的实时性。
结论
AGV实时轨迹前端实现是自动化领域的一个重要环节。通过掌握相关技术原理和实战应用,我们可以更好地发挥AGV的潜力,提高生产效率和物流管理水平。
转载请注明来自中成网站建设,本文标题:《AGV实时轨迹前端实现:技术解析与实战应用》





 蜀ICP备08106559号-1
蜀ICP备08106559号-1