



实时称重卡尔曼滤波:精确测量的关键技术
引言
在工业自动化和智能交通等领域,实时称重系统扮演着至关重要的角色。它不仅能够提供精确的重量数据,还能实时监测重量变化,对于质量控制和物流管理具有重要意义。卡尔曼滤波作为一种高效的信号处理技术,被广泛应用于实时称重系统中,以实现高精度和稳定性。本文将深入探讨实时称重卡尔曼滤波的原理、实现方法及其在实际应用中的优势。
卡尔曼滤波简介
卡尔曼滤波是一种线性、时不变的递归滤波算法,由美国科学家鲁道夫·卡尔曼于1960年提出。它能够从一系列观测数据中估计出系统的状态,并具有以下特点:
- 线性化处理:将非线性系统通过线性化方法转化为线性系统,便于计算。
- 最小均方误差:在所有线性无偏估计中,卡尔曼滤波器能够最小化估计误差。
- 递归计算:只需保存有限个历史数据,即可实现实时估计。
实时称重卡尔曼滤波原理
实时称重系统通常由传感器、信号处理单元和执行机构组成。在信号处理单元中,卡尔曼滤波器负责对传感器采集到的重量数据进行处理,以实现精确的重量估计。
1. 状态空间模型
实时称重卡尔曼滤波器首先建立状态空间模型,将重量视为状态变量。状态空间模型由以下三个部分组成:
- 状态方程:描述系统状态变化的方程,如 ( x_{k+1} = Fx_k + Bu_k ),其中 ( x_k ) 为状态向量,( F ) 为状态转移矩阵,( u_k ) 为控制向量。
- 观测方程:描述系统状态与观测数据之间的关系,如 ( z_k = Hx_k + v_k ),其中 ( z_k ) 为观测数据,( H ) 为观测矩阵,( v_k ) 为观测噪声。
- 初始状态:描述系统初始时刻的状态,如 ( x_0 )。
2. 卡尔曼滤波器算法
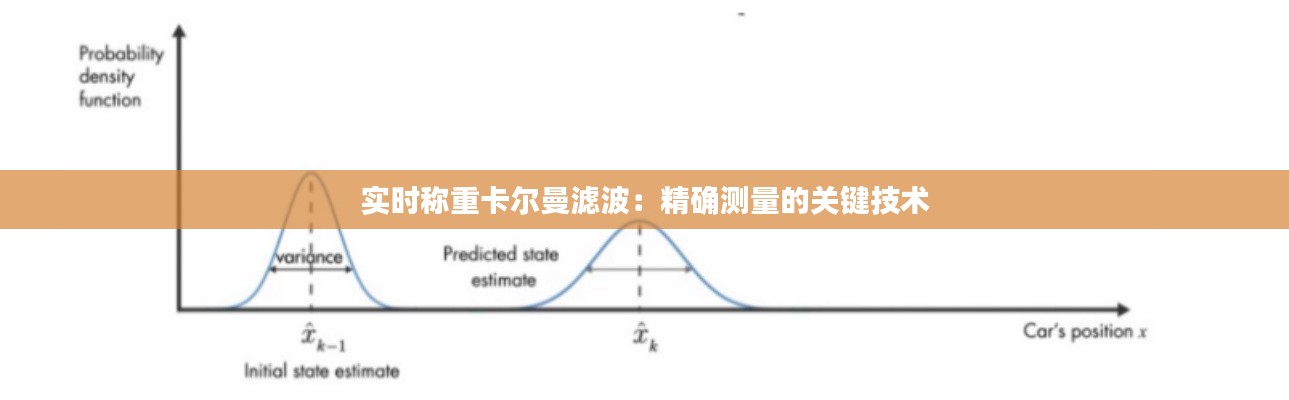
卡尔曼滤波器算法主要包括以下步骤:
- 预测:根据上一时刻的状态估计当前时刻的状态,如 ( \hat{x}k|{k-1} = F\hat{x}{k-1}|{k-1} + B\hat{u}_k )。
- 更新:结合观测数据对预测状态进行修正,如 ( \hat{x}_k|_k = \hat{x}k|{k-1} + K_k(z_k - H\hat{x}k|{k-1}) ),其中 ( K_k ) 为卡尔曼增益。
- 估计误差协方差:更新估计误差协方差矩阵,如 ( Pk = FP{k-1}F^T + Q_k ),其中 ( P_k ) 为估计误差协方差矩阵,( Q_k ) 为过程噪声协方差矩阵。
实时称重卡尔曼滤波实现
实时称重卡尔曼滤波的实现主要包括以下步骤:
- 传感器数据采集:通过传感器获取实时重量数据。
- 数据预处理:对采集到的数据进行滤波、去噪等预处理操作。
- 卡尔曼滤波器初始化:根据系统特性设置状态空间模型参数、初始状态、初始误差协方差等。
- 卡尔曼滤波器迭代:根据卡尔曼滤波器算法进行迭代计算,得到实时重量估计值。
实际应用优势
实时称重卡尔曼滤波在实际应用中具有以下优势:
- 高精度:卡尔曼滤波器能够有效降低观测噪声和系统噪声的影响,提高重量估计精度。
- 实时性:卡尔曼滤波器采用递归计算,能够实时更新重量估计值。
- 稳定性:卡尔曼滤波器能够适应系统状态变化,保持估计精度稳定。
结论
实时称重卡尔曼滤波作为一种高效、稳定的信号处理技术,在实时称重系统中具有广泛的应用前景。通过本文的探讨,我们了解了卡尔曼滤波的原理、实现方法及其在实际应用中的优势。随着技术的不断发展,实时称重卡尔曼滤波将在更多领域发挥重要作用。
转载请注明来自中成网站建设,本文标题:《实时称重卡尔曼滤波:精确测量的关键技术》





 蜀ICP备08106559号-1
蜀ICP备08106559号-1